Noot / Erwt Notes
Note #9 Sunday 02 October 2011
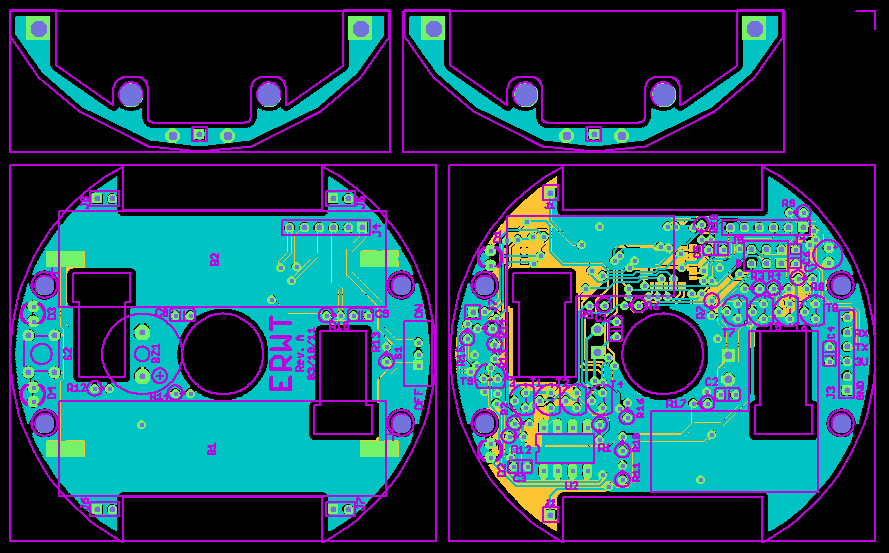
I reorganised the layout with the logic on the bottom board. This should make the kit steps simpler:
-
First, assemble the top board (batteries, switches, beeper, etc) and measure voltages.
-
Connect top and bottom boards via ribbon cable. Boards can be set next to each other at this stage.
-
Solder reset logic and serial connector, then connect to PC and test communication with ErwtForth (can beep buzzer and flash LEDs).
-
Solder H-Bridges and motors, test.
-
Solder remaining IO (light and reflectance sensors), test.
-
Bolt everything together.
Prototype Fab
I added a bumper PCB and was hoping to try out the DorkbotPDX PCB service, but I seem to have missed the October 3rd order. I’ll try again next week. If I’ve calculated correctly it should be around $100 for 3 full robots (a set of top, bottom and bumper).