Noot / Erwt Notes
Note #4 Tuesday 20 September 2011
Received the motors and they’re adorably tiny:

If only they had encoders, then they’d be perfect (I wonder if you can do rubbish encoding with a hall-effect sensors stuck to the side of a motor).
The motors run just fine from 1V up to 5V. At 3V, the no-load current is 80mA, and the stall current is 500mA.
Erwt CPU and Layout
I’ve decide on an ATMega168 for my Erwt development. I think it’s going to be too hard to fit any through hole AVR on the board with all the headers and other necessary parts. The ATMega would be the only SMT part and it could be pre-soldered in the case of a kit. The layout would look something like this:
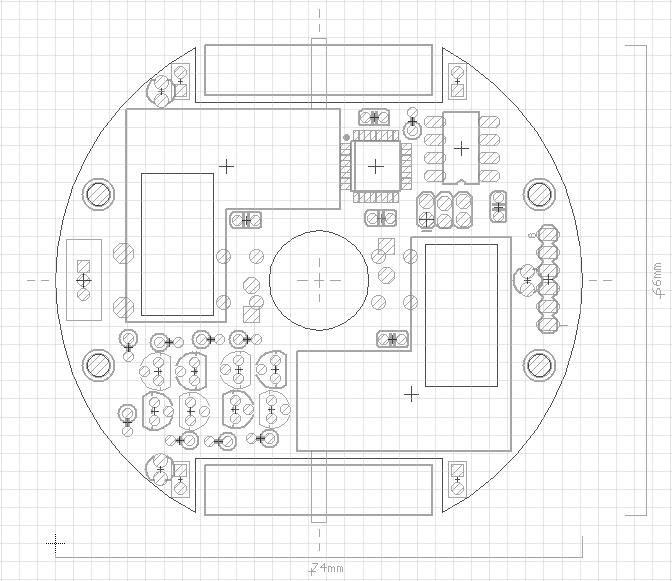
The 8 pin DIP is an I2C EEPROM for program storage. The 2x3 pin header is the AVR ISP while the 1x6 pin is for serial (I must decide on a standard for that). The 4x 2 pin headers would be to pass signals down to the bottom PCB (which could have line following sensors).
I’ve also ordered some veroboard and components to make a prototype Erwt board.
ErwtForth
I’ve started work on a very simple Forth environment in python which talks to a tiny C VM:
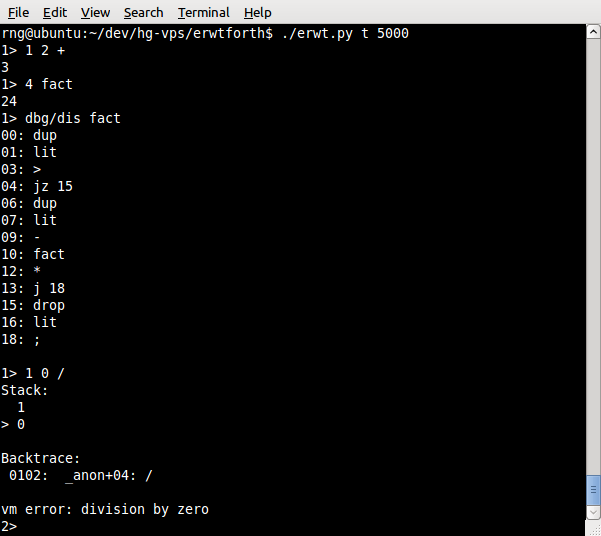
Its a disgrace to Forths (all the immediate words are implemented in Python), but it at least lets me play around on the AVR (I’ve compiled the VM for my old Cogbot board, which also has an ATMega168).