Noot / Erwt Notes
Note #2 Sunday 11 September 2011
Noot / Erwt
I’m going to split this robot into two different designs. Both will have the same motors and physical dimensions. The Noot will be “high density SMT” with ARM+FTDI and Pindakaas-powered. The Erwt will be through-hole (as much as possible, so it can be assembled as a kit) with an AVR running Forth.
Layout Test
I’ve done a quick layout test to check how the motors will fit:
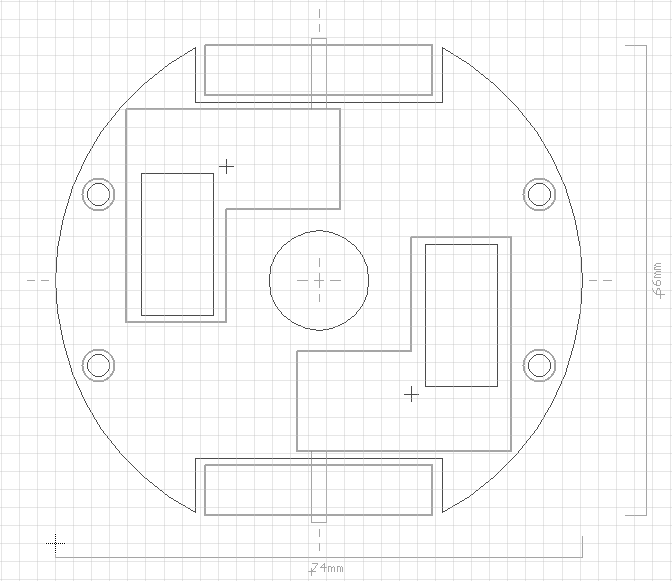
I think I’ll just sandwich the motors between two PCBs, then the 4 bolts will also act as casters. Doesn’t look like they have any convenient mounting holes. The space between the motors is enough for at most a 2cm hole for a pen. The batteries would then mount on the opposite side of the board (this render is for the Noot, and doesn’t show the other PCB):
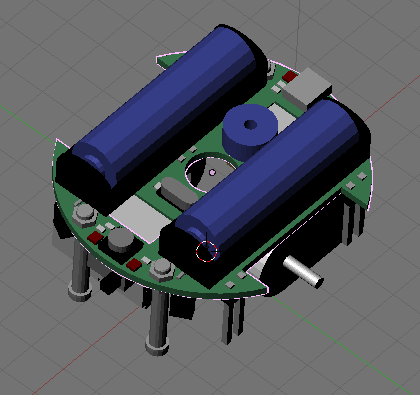
There’s definitely enough space for a few small TQFPs, which means the Noot design should work, but it’ll probably be quite tight with only through hole parts (for the Erwt). I think I’d leave USB off in the Erwt design (just use a FTDI cable), but it still needs to fit at least a CPU and a H-Bridge. 16pin DIPs will just fit between the motor and the bolt, so that limits me to a smaller ATTiny.